
| åƒæ•¸è¨å®šè»Ÿé«”如何使用?? | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1.將隨產å“所附之程å¼å…‰ç¢Ÿæˆ–由野力網站下載之æ“作程å¼å®‰è£æ–¼PC內部。安è£å®Œæˆå‡ºç¾Ye Li應用程å¼åœ–示。  <註:如之å‰å·²å®‰è£Ye Li軟體,請先移除å†é‡æ–°å®‰è£> 2.將驅動器å³ä¸Šæ–¹æ¨™ç¤ºCN3é€£æŽ¥åŸ ï¼Œèˆ‡PC RS232é€£æŽ¥åŸ å°æŽ¥ã€‚連接線之腳ä½åœ–,如附錄1圖示。  <註:驅動器CN3硬體與USB相åŒï¼Œä½†å…§éƒ¨ç‚ºRS232功能> 3.驅動器æ£é¢å³ä¸‹è§’標示VER2之硬體版本為070501,請用PC軟體VER7501æ“作驅動器新增功能方å¯æ‡‰ç”¨ã€‚  <註:未標示VER2之硬體版本為031220,æ“作軟體為031220> 4.使用VER7501軟體å¯è¨å®š031220版本硬體,但ä¸æ”¯æ´æ–°å¢žåŠŸèƒ½ã€‚ 5.使用VER2驅動器åŠ7501版軟體,載入原用031220å˜æª”應用程å¼ï¼Œéœ€æª¢è¦–ä½ç½®åƒæ•¸å…§éƒ¨ä¹‹ä½ç½®å‘½ä»¤å½¢å¼æ˜¯å¦éœ€ä¿®æ”¹? 6.建è°ä¿®æ”¹é©…å‹•å™¨å‡ºå» é è¨åƒæ•¸å‰ï¼Œå…ˆäºˆå„²å˜è¨å®šæª”,以備å†è¼‰å…¥ä½¿ç”¨ã€‚ 1.將驅動器CN3連接於PC RS232åŸ ï¼Œä¸¦æŽ¥é›»æºè¼¸å…¥é©…動器,å†æ–¼PCä¸Šé»žé¸   雙擊應用圖示,開啟軟體。 2.出ç¾ç•«é¢å¦‚下 2.1檔案ã€åƒæ•¸ã€èª¿æ©Ÿåƒæ•¸ã€é—œæ–¼  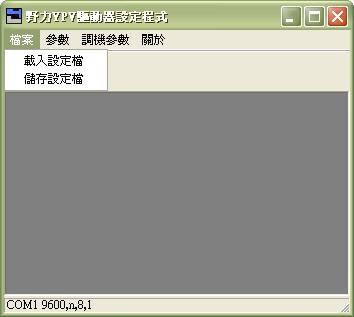 7.VER7501版軟體新增,ä½ç½®åƒæ•¸åˆ†å‘¨æ¯”è¨å®šï¼Œè„ˆæ³¢æŒ‡ä»¤æ˜‡é™ç·£é¸æ“‡åŠç·¨ç¢¼å™¨æ¿¾æ³¢é »çŽ‡è¨å®šç‰åŠŸèƒ½ã€‚  å¦æ–¼èª¿æ©Ÿåƒæ•¸å…§å¯ç›£è¦–馬é”轉速åŠé›»æµæ•¸å€¼ã€‚  2.1.1載入è¨å®šæª”→é¸å®šå‰å„²å˜å稱→載入→自動將檔覆蓋完æˆâ†’驅動器關閉電æºå†é‡æ–°é–‹å•Ÿâ†’完æˆè¼‰å…¥æ¥é©Ÿã€‚(VER7501軟體å¯é¸æ“‡)  è«‹é¸æ“‡ 是(Y) 覆蓋馬é”åƒæ•¸ 或 å¦(N) ä¸è¦†è“‹é¦¬é”åƒæ•¸ 2.1.2儲å˜è¨å®šæª”→檔案欄內éµå…¥æª”å→儲å˜éµâ†’完æˆå˜æª”。 註:首次æ“作驅動器內部åƒæ•¸ä¿®æ”¹ï¼Œå»ºè°å…ˆå„²å˜å‡ºå» 檔案,å†åŸ·è¡Œä¿®æ”¹æ¥é©Ÿå¦‚執行載入動作,載入之舊檔案需與馬é”馬力數ã€æ¡†æž¶è¦æ ¼ã€   轉速,相符åˆã€‚å¦å„²å˜æª”案å¯åŠ 註,馬é”框架è¦æ ¼åŠè½‰é€Ÿï¼Œå‚™ç”¨è¼‰å…¥æ™‚å°æ‡‰ä½¿ç”¨ã€‚ 2.2åƒæ•¸ 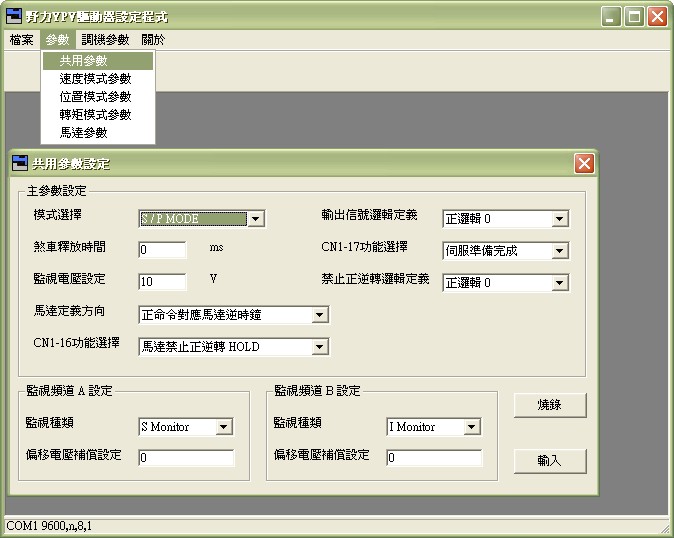 2.2.1模å¼é¸æ“‡ 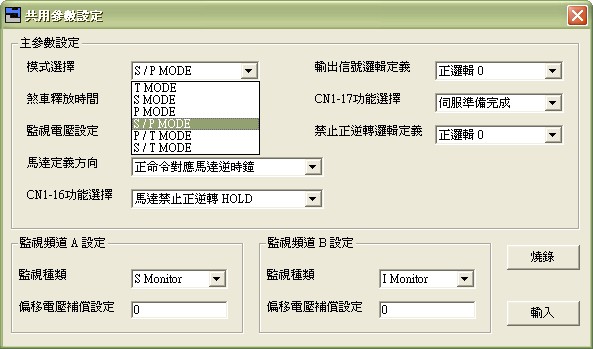 例: 模å¼é¸æ“‡â†’S/P MODE→é¸å®šé©…動器æ“作模å¼â†’輸入éµâ†’燒錄éµâ†’ ç´„ç‰å¾…5秒出ç¾ç‡’錄完æˆå°è©±è¦–窗  →關機é‡é–‹å®Œæˆæ¨¡å¼è¨å®š 2.2.2輸出信號é‚輯定義 
2.2.3ç¦æ¢æ£é€†è½‰é‚輯定義 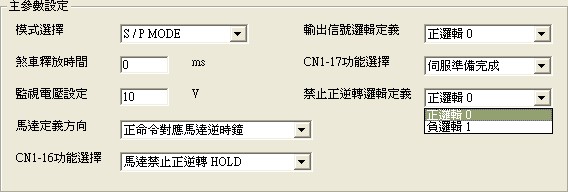
2.3速度模å¼åƒæ•¸è¨å®š 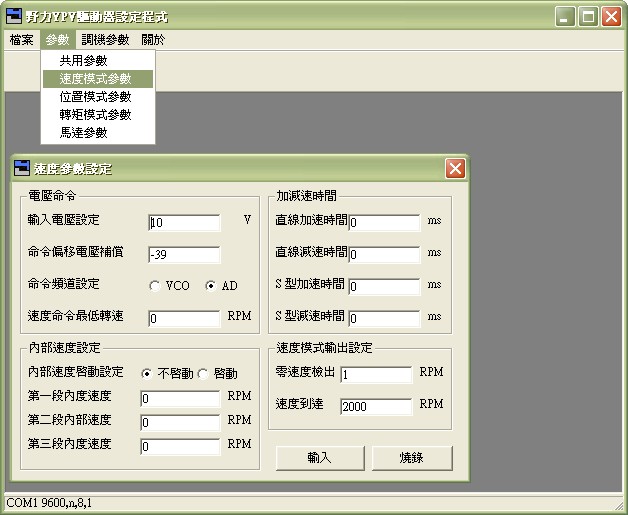 2.3.1電壓命令 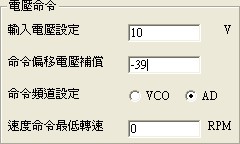
2.3.2內部速度è¨å®š 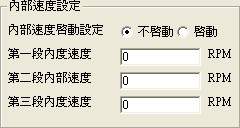
2.3.3åŠ æ¸›é€Ÿæ™‚é–“ 
2.3.4速度模å¼è¼¸å‡ºè¨å®š 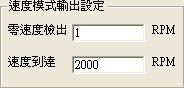
2.4ä½ç½®åƒæ•¸è¨å®š 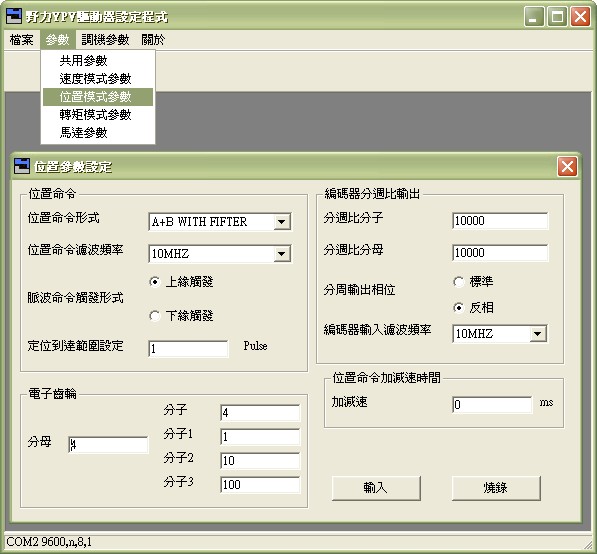 2.4.1ä½ç½®å‘½ä»¤ 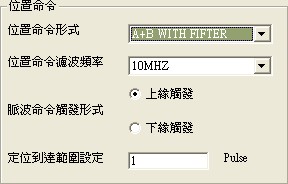
2.4.2é›»å齒輪 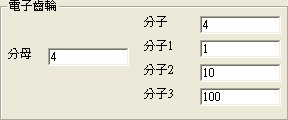
2.4.3編碼器分周比輸出 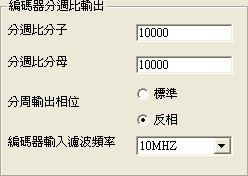  分週比分æ¯10000以馬é”編碼器2500PPR為主。如馬é”編碼器éž2500PPR需相å°æ›´å‹•ä¹‹ã€‚
2.4.4ä½ç½®å‘½ä»¤åŠ 減速時間 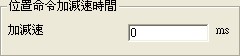
2.5轉矩模å¼åƒæ•¸è¨å®š 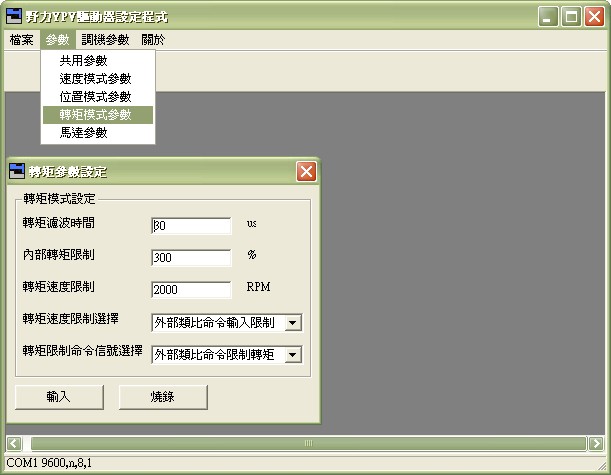
2.6馬é”åƒæ•¸è¨å®š 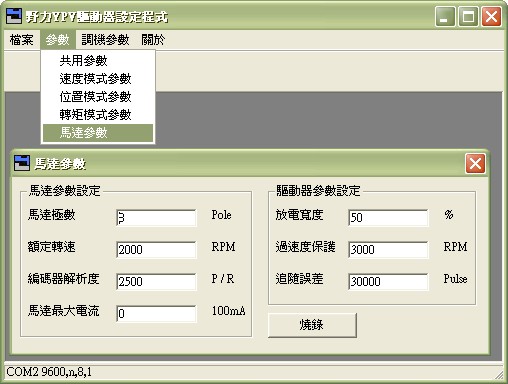 2.6.1馬é”åƒæ•¸è¨å®š 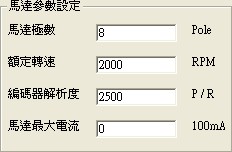
2.6.2驅動器åƒæ•¸è¨å®š 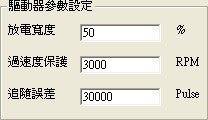
2.7調機åƒæ•¸ 2.7.1速度增益1 
2.7.2速度增益2 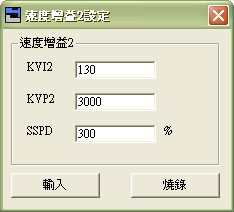
2.7.3ç›£è¦–æ¨¡å¼ 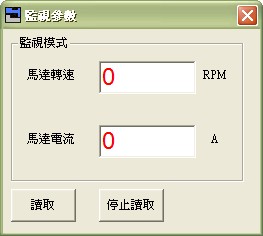
注æ„: ※ åƒæ•¸æ¨™ç¤ºå³æ™‚,按輸入éµç›¸å°åŠŸèƒ½å¯åšå‹•ã€‚ ※ åƒæ•¸æ¨™ç¤ºé‡ç½®ï¼ŒæŒ‰è¼¸å…¥éµå¾Œå†æŒ‰ç‡’錄éµï¼Œç‰ç‡’錄完æˆï¼Œé—œé›»é‡é–‹æœ‰æ•ˆã€‚ ※ 調機完æˆæœ€å¾Œéœ€åŸ·è¡Œç‡’錄æ¥é©Ÿã€‚é‡é–‹æ©Ÿæ–¹å¯é¡¯ç¤ºåŽŸä¾†ä¹‹è¨å®šå€¼ã€‚ ※ æ©Ÿå°å‡ºå» å‰è¦–需è¦ï¼Œåšå˜æª”æ“作。 附錄1  | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||